Технические особенности подводных роботов
Подводные роботы – это специальные устройства, разработанные для работы в водной среде. Они обладают рядом технических особенностей, которые позволяют им эффективно функционировать под водой.
Герметичность
Одной из ключевых особенностей подводных роботов является их герметичность. Это означает, что все компоненты и системы робота должны быть защищены от проникновения воды. Для этого используются специальные герметичные корпусы, уплотнения и прокладки.
Устойчивость к давлению
Подводные роботы работают на глубинах, где давление воды значительно выше, чем на поверхности. Поэтому они должны быть способны выдерживать высокое давление без повреждений. Для этого используются специальные материалы и конструкции, которые обеспечивают прочность и устойчивость робота к давлению.
Гидродинамический дизайн
Подводные роботы должны быть способны двигаться в воде с минимальным сопротивлением и максимальной эффективностью. Для этого они обладают гидродинамическим дизайном, который позволяет им снижать сопротивление воды и увеличивать скорость и маневренность.
Системы навигации и управления
Подводные роботы оснащены специальными системами навигации и управления, которые позволяют им перемещаться и выполнять задачи в водной среде. Эти системы включают в себя датчики для определения положения и ориентации робота, а также системы управления движением и манипуляторами.
Энергоснабжение
Подводные роботы нуждаются в энергии для своей работы. Они могут быть оснащены аккумуляторами, которые обеспечивают им энергию на определенное время, или системами зарядки, которые позволяют им получать энергию от внешних источников, таких как солнечные панели или кабели.
Коммуникационные системы
Подводные роботы должны иметь возможность обмениваться данными и коммуницировать с внешними устройствами. Для этого они оснащены специальными коммуникационными системами, которые позволяют им передавать информацию через воду или по радиоканалу.
Все эти технические особенности позволяют подводным роботам эффективно выполнять различные задачи в водной среде, от исследования морских глубин до выполнения работ на дне океана.
Преимущества и недостатки подводных роботов
Преимущества:
- Исследование недоступных мест: Подводные роботы позволяют исследовать места, к которым человеку трудно или опасно достучаться. Они могут погружаться на большие глубины, исследовать подводные пещеры, обследовать обломки кораблей и даже исследовать дно океана.
- Безопасность: Использование подводных роботов позволяет избежать риска для жизни и здоровья человека. Они могут выполнять опасные задачи, такие как обследование подводных сооружений или обезвреживание взрывоопасных предметов, минуя риск для людей.
- Длительное время работы: Подводные роботы могут работать в водной среде в течение длительного времени без необходимости выхода на поверхность для питания или отдыха. Это позволяет им выполнять задачи, требующие продолжительного времени, такие как мониторинг морской среды или поиск и спасение.
- Точность и повторяемость: Подводные роботы могут выполнять задачи с высокой точностью и повторяемостью. Они могут быть программированы для выполнения определенных действий с высокой степенью точности, что особенно полезно при выполнении сложных операций, таких как сбор образцов или выполнение хирургических процедур.
Недостатки:
- Ограниченная мобильность: Подводные роботы ограничены в своей мобильности в водной среде. Они могут двигаться только в определенных направлениях и скоростях, что может ограничивать их способность исследовать большие площади или перемещаться в сложных условиях.
- Ограниченная восприимчивость к окружающей среде: Подводные роботы могут столкнуться с проблемами, связанными с восприятием окружающей среды. Например, они могут испытывать трудности с видимостью в мутной воде или с ориентацией в сложных гидродинамических условиях.
- Зависимость от энергии: Подводные роботы требуют энергии для своей работы, и их длительность работы ограничена доступным источником энергии. Это может ограничивать их способность выполнять задачи на больших глубинах или в течение длительного времени без необходимости замены или перезарядки батарей.
- Сложность управления: Управление подводными роботами может быть сложным и требовать специальных навыков и обучения. Они могут быть чувствительны к изменениям в окружающей среде и требовать постоянного контроля и настройки для эффективной работы.
Несмотря на некоторые ограничения, подводные роботы представляют собой важный инструмент для исследования и выполнения задач в водной среде. Их преимущества включают возможность исследования недоступных мест, обеспечение безопасности, длительное время работы и высокую точность. Однако, для эффективного использования подводных роботов необходимо учитывать их ограниченную мобильность, восприимчивость к окружающей среде, зависимость от энергии и сложность управления.
Будущее подводных роботов
Будущее подводных роботов обещает быть захватывающим и полным новых возможностей. С развитием технологий и научных исследований, подводные роботы становятся все более усовершенствованными и способными выполнять сложные задачи в водной среде.
Улучшение мобильности
Одной из главных целей будущего развития подводных роботов является улучшение их мобильности. В настоящее время большинство подводных роботов ограничены в своей способности перемещаться и маневрировать в воде. Однако, исследователи работают над разработкой новых систем движения, таких как гибкие плавники и многосуставные конечности, которые позволят роботам более эффективно передвигаться и маневрировать в различных условиях.
Улучшение датчиков и восприятия
Для более точного и эффективного выполнения задач, подводные роботы будут оснащены более совершенными датчиками и системами восприятия. Это позволит им лучше ориентироваться в окружающей среде, обнаруживать и анализировать объекты, измерять параметры воды и многое другое. Улучшенные датчики и системы восприятия также помогут роботам избегать препятствий и опасностей, что повысит их безопасность и эффективность.
Развитие автономности
Автономность является одним из ключевых направлений развития подводных роботов. В будущем они будут способны принимать решения и выполнять задачи без постоянного управления оператором. Развитие искусственного интеллекта и машинного обучения позволит роботам обучаться и адаптироваться к различным ситуациям, что сделает их более гибкими и эффективными в выполнении задач.
Расширение области применения
С развитием подводных роботов и улучшением их возможностей, расширится и область их применения. В настоящее время они используются в различных областях, таких как исследования морской фауны и флоры, обнаружение и исследование подводных объектов, мониторинг окружающей среды и многое другое. В будущем подводные роботы могут быть задействованы в таких областях, как глубоководные исследования, подводная археология, морская геология и даже в медицине для исследования подводных биологических систем и лечения заболеваний.
В целом, будущее подводных роботов обещает быть захватывающим и полным новых возможностей. С развитием технологий и научных исследований, мы можем ожидать появления более усовершенствованных и автономных подводных роботов, которые будут играть важную роль в исследовании и выполнении задач в водной среде.
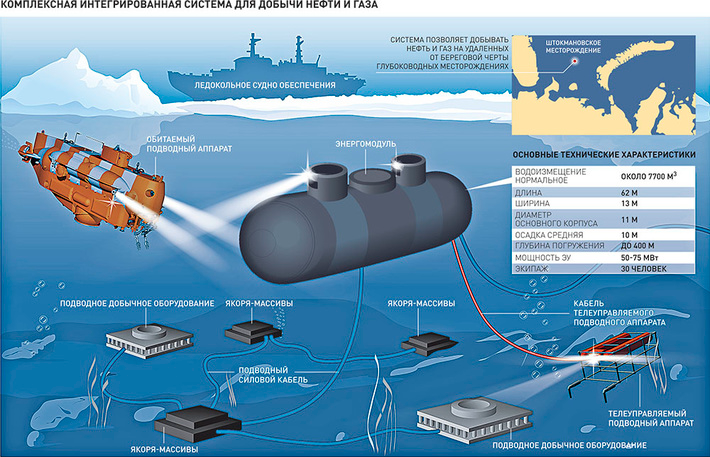
 Рис. 1. Автономный подводный аппарат (AUV) трансформируется в дистанционно управляемый аппарат (ROV) с массивными манипуляторами и надежным сенсорным комплексом, подходящим для выполнения работ на подводных нефтяных месторождениях.
Рис. 1. Автономный подводный аппарат (AUV) трансформируется в дистанционно управляемый аппарат (ROV) с массивными манипуляторами и надежным сенсорным комплексом, подходящим для выполнения работ на подводных нефтяных месторождениях.
 Рис. 2. Подводный робот, предназначенный для проверки морских нефтегазовых активов без необходимости использования дорогостоящих надводных вспомогательных судов
Рис. 2. Подводный робот, предназначенный для проверки морских нефтегазовых активов без необходимости использования дорогостоящих надводных вспомогательных судов